
TF5110 | TwinCAT 3 Kinematic Transformation L1

TF5110 | TwinCAT 3 Kinematic Transformation L1

All functionalities on a single control platform: ATRO and TwinCAT
eXtended Motion Control: Robotic Control with TwinCAT Kinematic Transformation.

Various robot types kinematics can be realized using TwinCAT Kinematic Transformation. The programming of the robot movements takes place in Cartesian coordinates using either DIN 66025 instructions or the PLCopen-compliant blocks from the PLC. An integrated dynamic pre-control ensures high precision of the movement even at high accelerations and speeds. Configuration takes place in TwinCAT 3 Engineering.
Features
- supports various parallel and also serial kinematics, e.g. for pick-and-place tasks
- supports the programming of interpolating movements in G-code (DIN 66025)
- alternatively, standard PTP and cam plate applications can be realized
- simple programming in the Cartesian coordinate system
- automatic calculation of the inverse kinematic for the relevant motor positions
- kinematics configured in TwinCAT 3 Engineering; in addition to the type (e.g. delta), the bar lengths and offsets must also be parameterized
- mass and mass inertia values can be specified for dynamic pre-control
- optimized for the Beckhoff Servo Drives
- basic package integrating the following kinematics: cartesian portals
- User can realize and integrate own kinematics in C++.
Product status:
regular delivery
Product information
| Technical data | TF5110 |
|---|---|
| Required license | TC1260 |
| Includes | TF5440 |
| Included in | TF5111, TF5112, TF5113 |
| Operating system | Windows 10, Windows 11 |
| CPU architecture | x64 |
| Ordering information | |
|---|---|
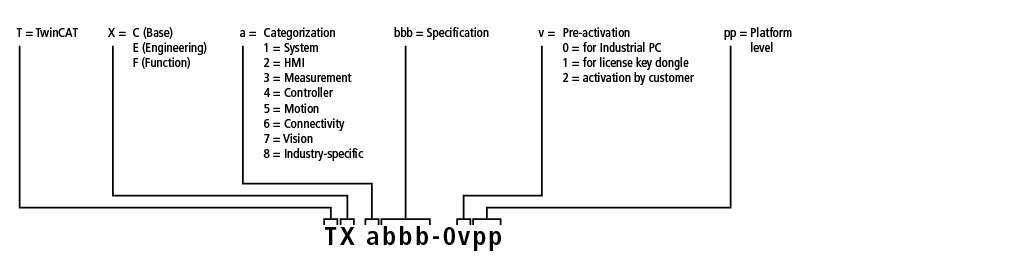
| TF5110-0v40 | TwinCAT 3 Kinematic Transformation L1, platform level 40 (Performance) |
| TF5110-0v50 | TwinCAT 3 Kinematic Transformation L1, platform level 50 (Performance Plus) |
| TF5110-0v60 | TwinCAT 3 Kinematic Transformation L1, platform level 60 (Mid Performance) |
| TF5110-0v70 | TwinCAT 3 Kinematic Transformation L1, platform level 70 (High Performance) |
| TF5110-0v80 | TwinCAT 3 Kinematic Transformation L1, platform level 80 (Very High Performance) |
| TF5110-0v81 | TwinCAT 3 Kinematic Transformation L1, platform level 81 (Very High Performance) |
| TF5110-0v82 | TwinCAT 3 Kinematic Transformation L1, platform level 82 (Very High Performance) |
| TF5110-0v83 | TwinCAT 3 Kinematic Transformation L1, platform level 83 (Very High Performance) |
| TF5110-0v84 | TwinCAT 3 Kinematic Transformation L1, platform level 84 (Very High Performance) |
| TF5110-0v90 | TwinCAT 3 Kinematic Transformation L1, platform level 90 (Other 1…4 Cores) |
| TF5110-0v91 | TwinCAT 3 Kinematic Transformation L1, platform level 91 (Other 5…8 Cores) |
| TF5110-0v92 | TwinCAT 3 Kinematic Transformation L1, platform level 92 (Other 9…16 Cores) |
| TF5110-0v93 | TwinCAT 3 Kinematic Transformation L1, platform level 93 (Other 17…32 Cores) |
| TF5110-0v94 | TwinCAT 3 Kinematic Transformation L1, platform level 94 (Other 33…64 Cores) |
We recommend using a TwinCAT 3 license dongle for platform levels 90-94.
Loading content ...
Loading content ...
Loading content ...
© Beckhoff Automation 2025 - Terms of Use